

1. Կարգավորիչի էլեկտրական կատարողականի տեխնիկական բնութագրերը
(1) Լարման միջակայք՝ DC5V-28V:
(2) Գնահատված հոսանքը՝ MAX2A, ավելի մեծ հոսանքով շարժիչը կառավարելու համար շարժիչի էլեկտրամատակարարման գիծը միացված է անմիջապես էլեկտրամատակարարմանը, այլ ոչ թե կարգավորիչի միջոցով։
(3) PWM ելքային հաճախականությունը՝ 0~100KHz:
(4) Անալոգային լարման ելք՝ 0-5 Վ։
(5) Աշխատանքային ջերմաստիճան՝ -10℃ -70℃ Պահպանման ջերմաստիճան՝ -30℃ -125℃:
(6) Վարորդի տախտակի չափսը՝ երկարություն 60 մմ X լայնություն 40 մմ

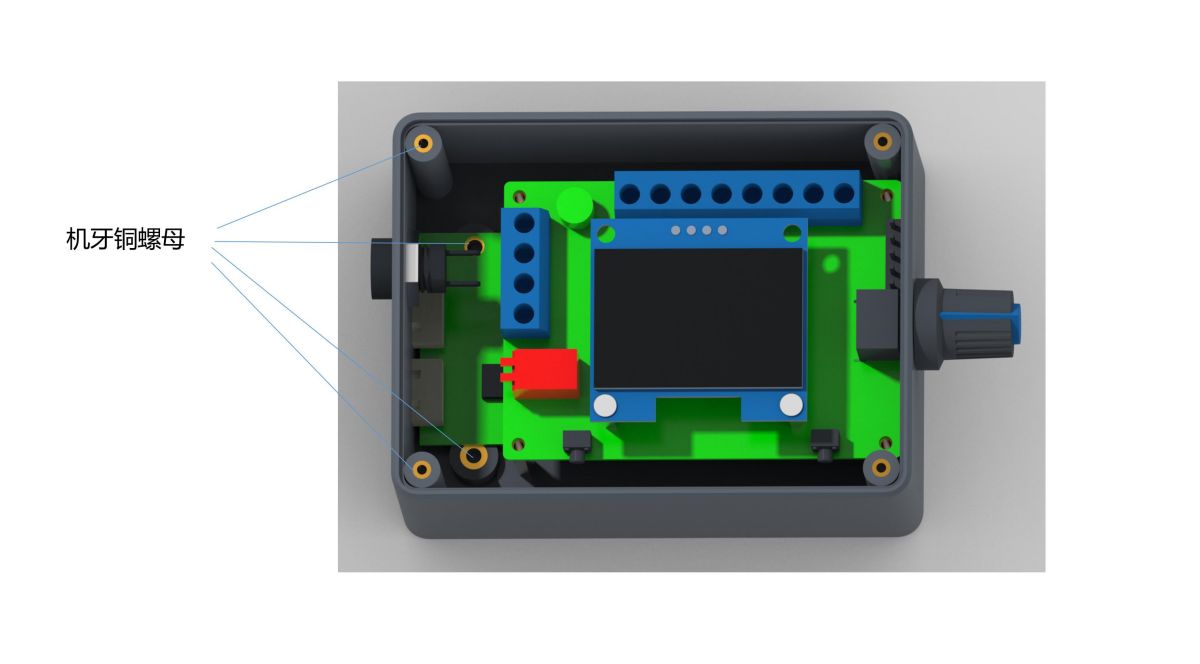
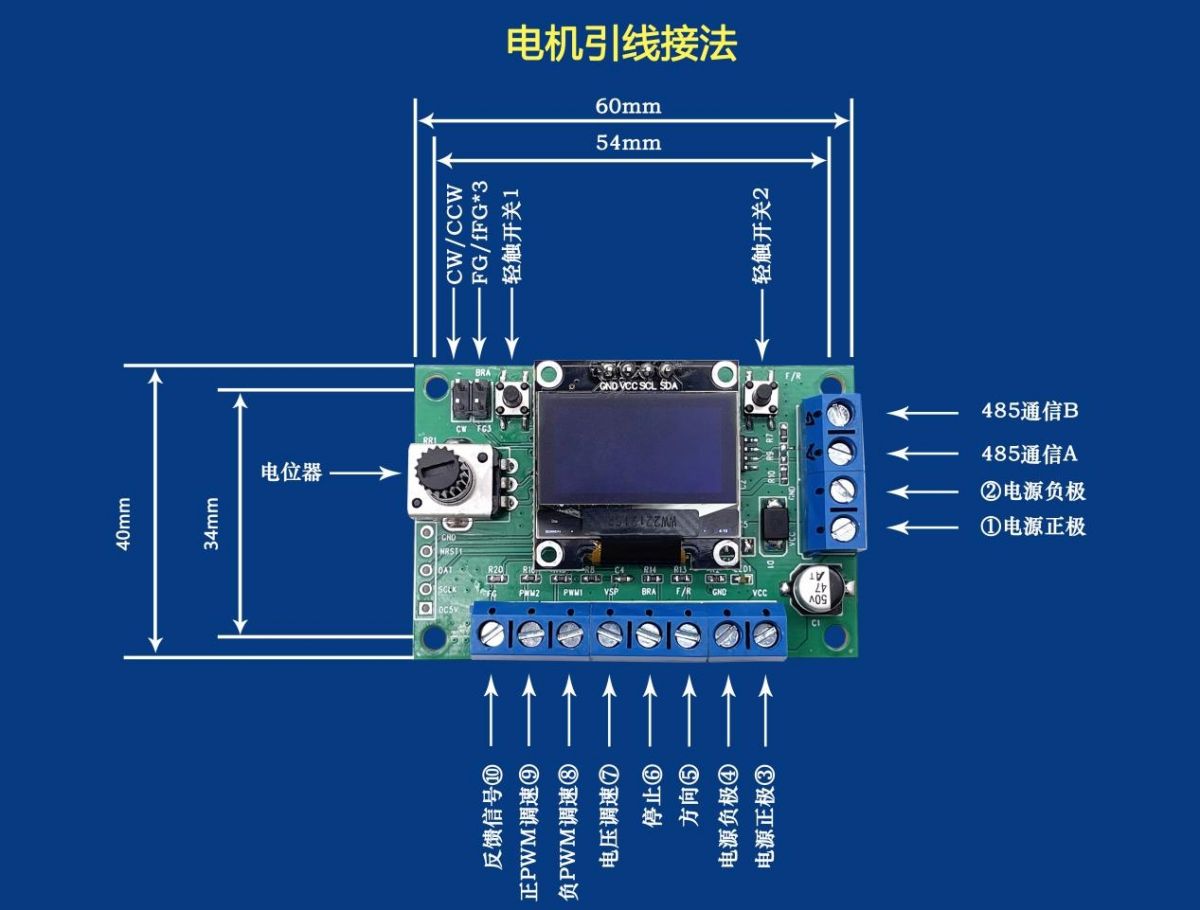
2. Կարգավորիչի միացման և ներքին ֆունկցիայի նկարագրությունը
① Կարգավորիչ, շարժիչի սնուցման դրական մուտք։
② Կարգավորիչ, շարժիչի մուտքային հզորությունը բացասական է։
③ Շարժիչի էլեկտրամատակարարման դրական ելքը։
④ Շարժիչի էլեկտրամատակարարման բացասական ելքը։
⑤ Դրական և բացասական պտտման կառավարման բարձր և ցածր մակարդակի ելք, բարձր մակարդակ 5V, ցածր մակարդակ 0V, կառավարվում է սենսորային անջատիչ 2-ով (F/R), լռելյայնը բարձր մակարդակ է։
⑥ Արգելակի կառավարման բարձր և ցածր մակարդակի ելքային լարում, բարձր մակարդակ 5V, ցածր մակարդակ 0V, կառավարվում է սենսորային անջատիչ 1-ով (BRA), միանում է լռելյայն բարձր մակարդակին։
7 Անալոգային լարման ելք (0~5V), այս ինտերֆեյսը հարմար է անալոգային լարման արագության կարգավորման շարժիչ ընդունելու համար։
⑧PWM1 հակադարձ ելք, այս ինտերֆեյսը հարմար է այն շարժիչի համար, որը ընդունում է PWM արագության կարգավորում, և արագությունը հակադարձ համեմատական է աշխատանքային ցիկլին:
⑨PWM2 ուղիղ ելք, այս ինտերֆեյսը հարմար է PWM արագության կարգավորում ընդունող շարժիչների համար, արագությունը համեմատական է աշխատանքային ցիկլին։
⑦-⑨ Երեք ինտերֆեյսների ելքային ազդանշանների փոփոխությունները կարգավորվում են պոտենցիոմետրով։
⑩ Շարժիչի հետադարձ կապի ազդանշանի մուտքագրում։
Նշում. FG/FG*3-ը պետք է հիմնված լինի շարժիչի իրական հետադարձ կապի ժամանակների վրա՝ անկախ նրանից, թե արդյոք պետք է ավելացնել ցատկող կափարիչ, ցատկող կափարիչի բացակայությունը FG-ի մեկ անգամն է, ցատկող կափարիչի ավելացումը FG*3-ի 3 անգամն է: Նույնը վերաբերում է նաև CW/CCW-ին:
3. Կարգավորեք որոշ պարամետրեր
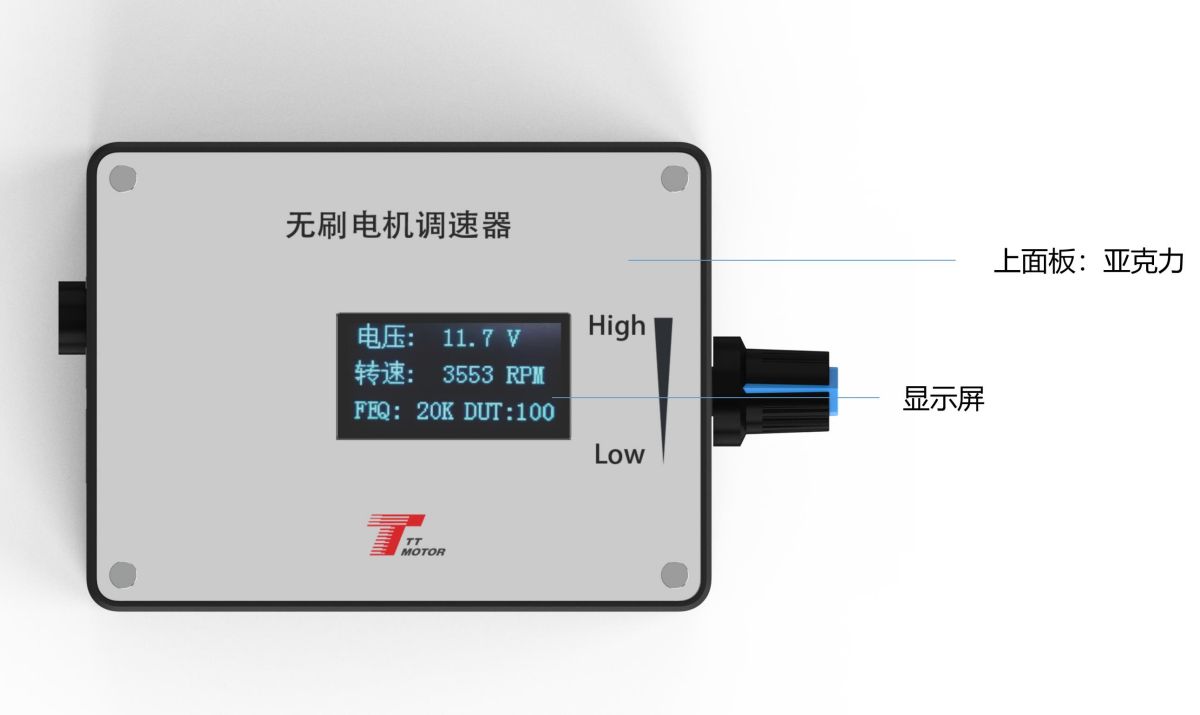
(1) Հաճախականության կարգավորում. միացնելուց առաջ սեղմեք և պահեք սենսորային անջատիչը 1, մի՛ բաց թողեք, այնուհետև միացրեք կարգավորիչի վահանակը, սպասեք մինչև էկրանին ցուցադրվի «FEQ:20K», երբ կոճակը բաց է թողնվում, այնուհետև սեղմեք անջատիչ 1-ը՝ նվազեցնելու համար, սեղմեք անջատիչ 2-ը՝ ավելացնելու համար: Հաճախականությունը կարող է կարգավորվել նշված հաճախականությանը համապատասխան, գործարանային լռելյայն արժեքը 20 կՀց է:
(2) Բևեռների քանակը սահմանված է. միացնելուց առաջ միաժամանակ սեղմած պահեք լույսի անջատիչ 1-ը և լույսի անջատիչ 2-ը, մի՛ բաց թողեք, այնուհետև միացրեք կարգավորիչ վահանակը, սպասեք մինչև էկրանին երևա «բևեռների քանակը՝ 1 բևեռականություն» օրինակը։ Բաց թողեք կոճակը, այնուհետև լույսի անջատիչ 1-ը փոքրացվում է, լույսի անջատիչ 2-ը ավելացվում է։ Կարգավորվող բևեռի համարը շարժիչի համար նախատեսված բևեռի համարն է, իսկ գործարանային լռելյայն արժեքը 1 բևեռ է։
(3) Հետադարձ կապի կարգավորում. Նկար 1-ում FG/FG*3 միակցիչը սահմանված է որպես հետադարձ կապի բազմապատիկ, որը սահմանվում է ըստ այն բանի, թե արդյոք շարժիչի հետադարձ կապի բազմապատիկը մեկ անգամ FG է, թե եռ անգամ FG, ցատկող գլխիկի ավելացումը կազմում է 3 անգամ FG, իսկ ցատկող գլխիկի չավելացումը կազմում է մեկ անգամ FG:
(4) Ուղղության կարգավորում. Նկար 1-ում պատկերված CW/CCW պտույտը շարժիչի ուղղության կարգավորումն է իր սկզբնական վիճակում: Այն կարգավորվում է ըստ այն բանի, թե արդյոք շարժիչը CW է, թե CCW, երբ շարժիչի ուղղության կառավարման գիծը կախված է: CCW՝ ավելացված բաց թողնվող կափարիչով, CW՝ առանց բաց թողնվող կափարիչի:
Գլխավոր. Հոսանքի էկրանը հիմնականում ցուցադրում է այս չորսի մուտքային լարումը, արագությունը, հաճախականությունը, աշխատանքային ցիկլը: Արագությունը պետք է սահմանված լինի FG/FG*3 նորմալ ցուցադրման, բևեռի համարի վրա:


4. Նահանգապետի նախազգուշական միջոցները
(1) Կարգավորիչի դրական և բացասական էլեկտրամատակարարումները պետք է միացված լինեն հրահանգներին համապատասխան և չպետք է շրջվեն, հակառակ դեպքում կարգավորիչը չի կարող աշխատել և կայրվի։
(2) Կարգավորիչը օգտագործվում է շարժիչը վերը նշված կառավարման ինտերֆեյսին համապատասխանեցնելու համար։
3, ⑤-⑨ Հինգ միացքները չեն կարող մուտք գործել 5 Վ-ից ավելի լարման։

Հրապարակման ժամանակը. Հուլիս-21-2023